En este blog podemos encontrar definiciones, imágenes y vídeos de: automatizacion, control, sistema de lazo abierto, sistema de lazo cerrado, sensor, tipos de sensores
La búsqueda de una mayor comodidad para los usuarios y de la eliminación de la posibilidad del fallo humano en la actividad tecnológica y los procesos industriales se puede dividir en tres fases.
Primera fase mecanización:El usuario pasa de hacer un trabajo a limitarse a controlar o programar una maquina que lo hace. Las maquinas no solo reducen el trabajo manual sino el numero de usuarios ocupados en esta tarea.
Segunda fase automatización: Cuando la maquina pueda trabajar sin necesidad de un control permanente por parte del usuario una vez que se ha puesto en marcha.
Tercera fase robitización : El ultimo paso consiste en sustituir no solo el trabajo manual del hombre sino también el intelectual mediante una maquina inteligente que no solo es capaz de hacer una labor repetitiva sin necesidad de supervision externa, sino que sabe tomar decisiones.
Actualmente se emplea en la obtención de productos son la necesidad de intervención humana en el proceso.
Entendemos como un sistema de control a la combinación de componentes que actúan juntos para realizar el control de un proceso.
Este control se puede hacer de forma continua, es decir en todo momento o de forma discreta, es decir cada cierto tiempo.
Cuando el sistema es continuo, el control se realiza con elementos continuos.
Cuando el sistema es discreto, el control se realiza con elementos digitales como el ordenador, por lo que hay que digitalizar los valores antes de su procesamiento y volver a convertirlos tras el procesamiento.
En cualquier caso existen dos tipos de sistemas, sistema de lazo abierto y sistema de lazo cerrado.
Los sistemas de lazo abierto son aquellos en los que la salida no tiene influencia sobre la señal de entrada. Cuando nosotros variamos el potenciometro de un volumen, varia la cantidad de potencia que entrega el altavoz, pero el sistema no sabe si se ha producido la variación que deseamos o no.
La mayor parte de sistema de lazo abierto serán automatismos a los que no podemos llamar en sentido estricto robots porque, al no tener en cuanta la salida, su capacidad de toma de decisiones "inteligentes" es muy limitada.
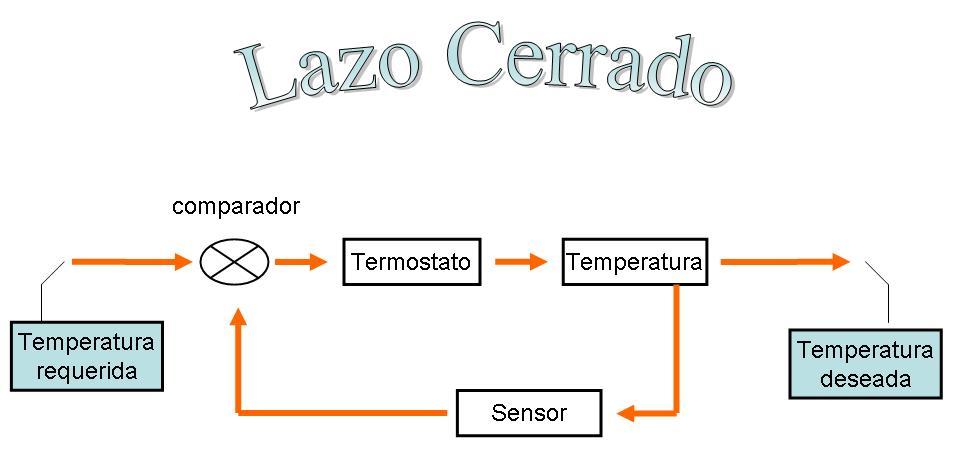
Los sistemas de lazo cerrado son aquellos en los que la salida influye sobre la señal de entrada.
La toma de decisiones del sistema no depende de solo de entrada sino también de la salida.
El sistema es mas flexible y capaz de reaccionar si el resultado que esta obteniendo no es el esperado; los sistemas a los que podemos llamar robots casi siempre son de lazo cerrado.
Los datos de entrada y de realimentación de los sistemas de control se introduce mediante unos dispositivos, normalmente electrónicos.
El sensor traduce la información que llega del exterior en un impulso electrónico, normalmente digital (pasa o no pasa corriente), que puede ser analizado y procesado por la unidad de control del sistema.
Los sistemas también constituyen el sistema de percepción del robots.
Esto es, facilitan la información del mundo real para que los robots la interpreten.
Sensor de proximidad:Detecta la presencia de un objeto de tipo metálico o de otro tipo.
sensor de temperatura: Capta la temperatura del ambiente, de un ambiente o de un objeto determinado.
Los termistores son los principales sensores de temperatura.
sensores magnéticos: Capta la variación de campos magnéticos. Entre sus aplicaciones está la orientación de robots autónomos, exploradores,etc.
Detecta los campos de magnéticos que provocan los imanes o las corrientes eléctricas.El principal es el llamado interruptor Reed; consiste en un par de laminas metálicas de materiales ferromagnéticos metidas en el interior de una capsula que se atraen en presencia de un campo magnético, cerrando el circuito.
sensores táctiles, piel robótica: Sirven para detectar la forma y el tamaño de los objetos que el robot manipula. La piel robótica se trata de un conjunto de sensores de presión montados sobre una superficie flexible.
sensores de velocidad: Se emplean para determinar la velocidad de actuación de las distintas partes móviles del propio robot o cuando se produce una vibración. También se detecta la inclinación a la que se encuentra con respecto a la gravedad del robot o una parte de él.
sensores de presión: Permiten controlar la presión que ejerce la mano del robot al coger un objeto.
sensores de sonido: Se tarta de un micrófono con el poder de oír los sonidos.
sensores de contacto: Se emplean para detectar el final del recorrido o la posición limites de componentes mecánicos.
sensores ópticos: Detectan la presencia de una persona o de un objeto que interrumpen el haz de luz que le llega a el sensor.
Los principales sensores ópticos son las fotorresistencias las, LDR.
sensores de humedad: Se basan en que el agua no es un material aislante como el aire sino que tiene una conductividad eléctrica, por esa razón el reglamento de baja tensión prohíbe la presencia de tomas de corriente próximas a la bañera.
El sistema eléctrico muestra una sonda que detectaría la humedad y gracias a los transistores se amplifica la señal para poner en marcha la bomba de riego.
sensores infrarrojos: Si recordamos el espectro electromagnético estudiando en un tema anterior, existía una franja de ondas electromagnéticas cuya frecuencia es muy baja para que nuestros ojos la detecten.
Existen diodos capaces de emitir luz infrarroja y transistores sensibles a este tipo de ondas y que por lo tato detectan las emisiones de diodos.